Welcome to the website of the Advanced Controls Research Laboratory. Here we work on a wide range of interdisciplinary problems, and we collaborate with industry and government laboratories on the transition and commercialization of our solutions across different industries.
W. Grafton and Lillian B. Wilkins Professor
nhovakim@illinois.edu
Mechanical Science and Engineering
University of Illinois at Urbana-Champaign
View Bio
TEDx Talks: The Hidden Cost of Resistance to Innovation in Science
Flight Test of L1 Adaptive Augmentation on Learjet 25: Lifting Body & Engine Out
Our Lab
Deep Learning Server

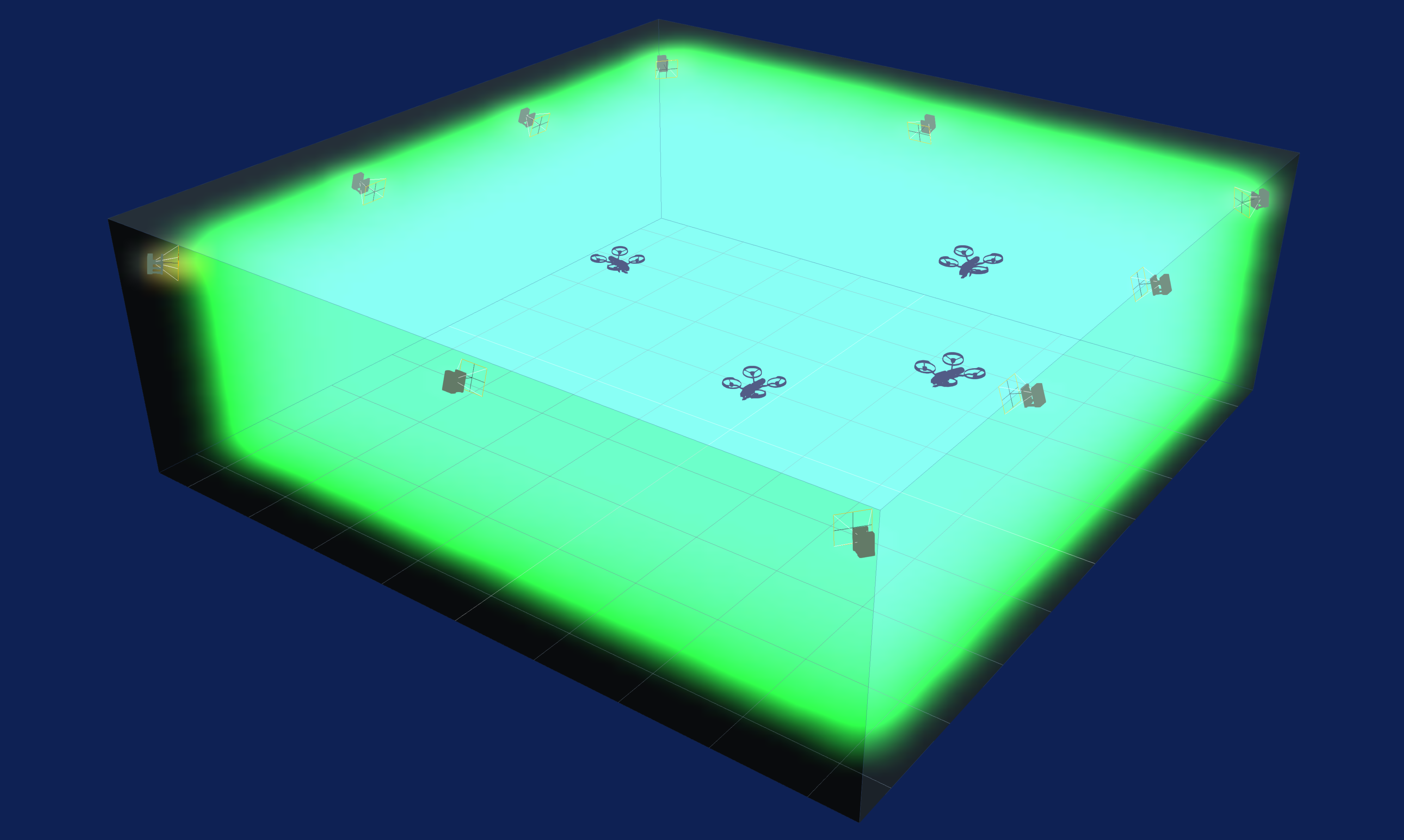
Vicon
Recent News
Congratulations! Jing Wu defended his thesis successfully!
Congratulations to Jing! He defended his Ph.D. final exam successfully!

Congratulations! Naira named ASME Fellow!
MechSE Professor Naira Hovakimyan was named a Fellow of the American Society of Mechanical Engineers (ASME). The distinction recognizes Hovakimyan’s exceptional engineering achievements…
Congratulations! Neng Wan defended his thesis successfully!
Congratulations to Neng! He defended his Ph.D. final exam successfully! Here is the final defense recording. The link to the…

Researchers debut new study for safe learning-enabled systems
Grainger Engineering Professor Naira Hovakimyan is leading a new study that seeks to develop safe learning architecture for autonomous systems. Her NSF-funded…

MechSE Magazine Summer 2023
We are focused on the verification and validation tools and frameworks for the L1 adaptive controller, augmented with robust perception…

Kim recruited to attend Hyundai Vision Conference
Mechanical engineering graduate student Minkyung Kim has been selected to attend the 2023 Hyundai Vision Conference. The detail can be…

Naira wins the Outstanding Advisor Award
Congratulations to Naira for winning the Outstanding Advisor Award! https://mechse.illinois.edu/news/55496

Lin was awarded the 2023-2024 Yee Fellowship!
Congratulations to Lin Song, our Ph.D. student, for being awarded the prestigious Yee Memorial Fund Fellowship! The Yee Memorial Fellowship…

Congratulations to Our Lab for Winning the 3rd Place at the Engineering Open House
We won the 3rd Place at the Engineering Open House in 'The Future, Today.' The detail can be checked here.…
AVIATE SEMINAR “Robust and Resilient Autonomy for Advanced Air Mobility
The seminar is presented by Dr. Christopher Elliott. The video and slides can be found here.