Vicon Lab




VICON system:
9x Vantage V16 cameras
16MP sensor, 100 Hz.
Environment:
5x5x3 m flying space
Protective net, Foam floor
Robots:
Intel Aero platform, Qualcomm Snapdragon
Crazyflies, Jackal UGV.
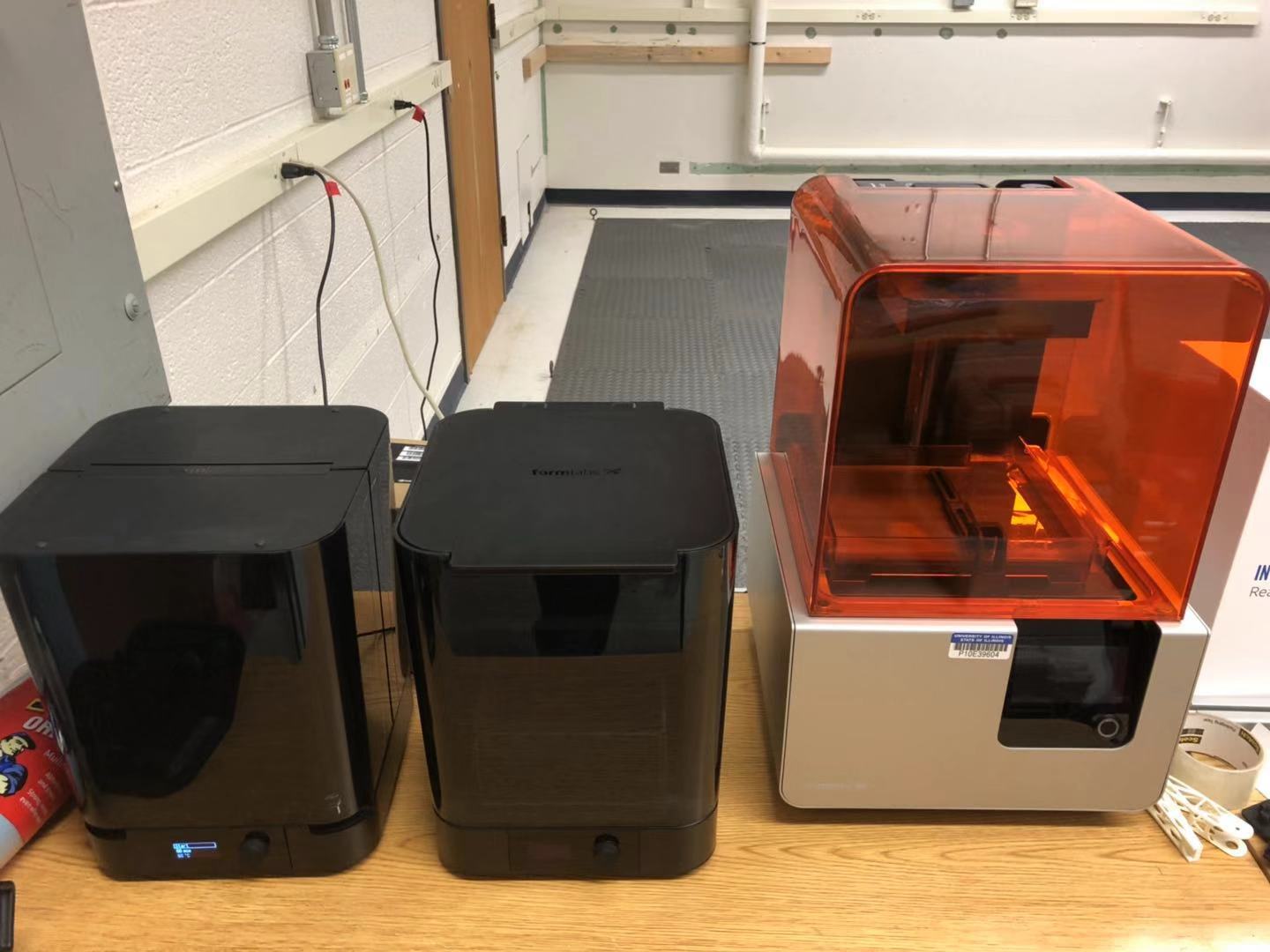
Prototyping:
Ultimaker 3 Extended
Form 2 with wash and cure stations.
Projects in Vicon Lab
Vision Based Aerial Manipulation
In the near future aerial robots will be helping elderly and disabled people with everyday activities, improving the quality of their lives by providing increased independence. Object manipulations, including missions such as object search, localization, and pick-and-place, are highly desirable for this purpose. An aerial manipulator, which combines a UAV and a robot arm, is a suitable candidate for such tasks. Figure 1 shows some aerial manipulators built in our first year’s study of this project. To achieve autonomous manipulations of objects, the aerial manipulators need the capability of household object detection and localization. In addition, some objects or missions require cooperation of multiple aerial manipulators to increase efficiency. For example, it takes less time if several UAVs could search for an object simultaneously, and this is especially helpful when the human user needs the item urgently. Besides, for a larger object, one UAV may not be capable of picking it up, and cooperative operations among multiple small UAVs can be required. Inspired by these challenges, this extended proposal focuses on the framework of vision based cooperative assistant aerial vehicles with a focus on vision-based control algorithm of multi-aerial manipulator platform, which can navigate the indoor space efficiently, pick up a certain large object and deliver it safely to the human user.
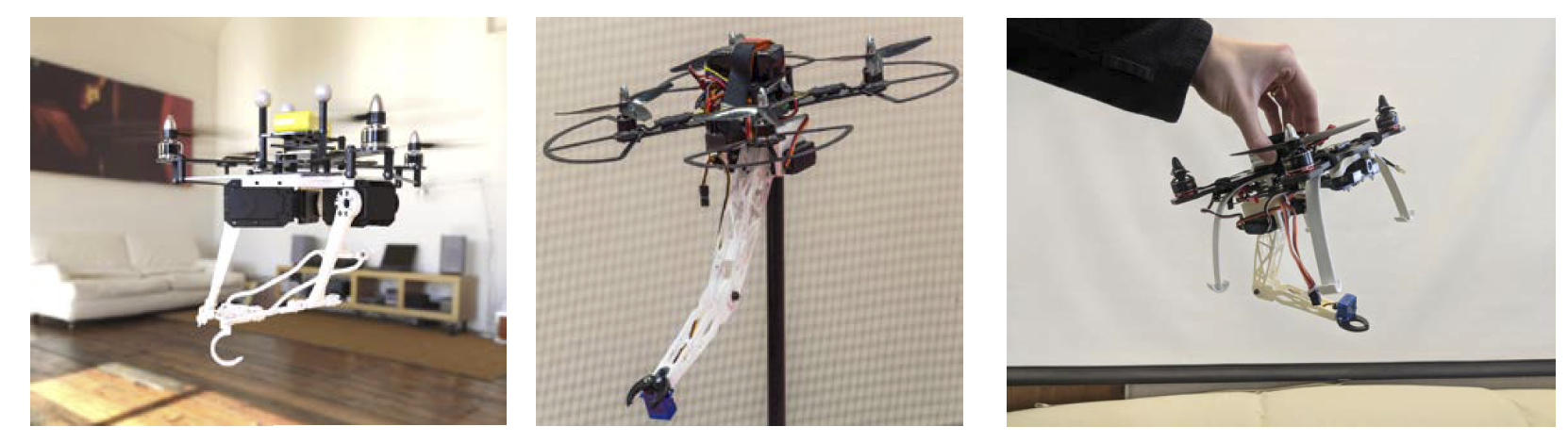
Figure 1. Various aerial manipulators developed for this project
An example of the possible mission scenario with multiple assistant aerial vehicles is shown in Figure 2.
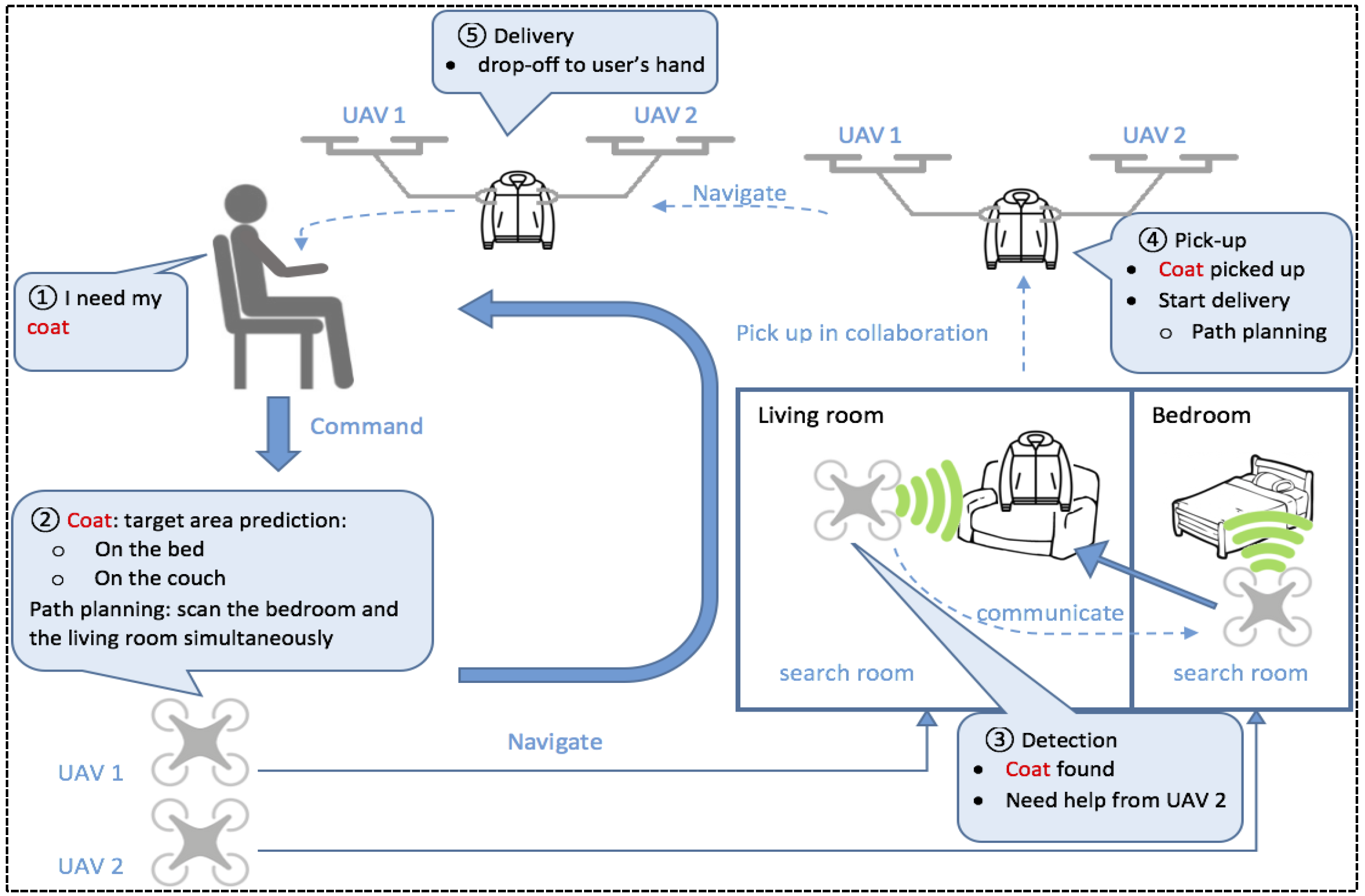
Figure 2. Example scenario – to deliver a coat with multiple assistant aerial vehicles