
Naira Hovakimyan
http://naira.mechse.illinois.edu/
e-mail: nhovakim@illinois.edu
Advanced Controls Research Laboratory
Department of Mechanical Science and Engineering
University of Illinois at Urbana-Champaign
Urbana, IL :: September 2013
Outline
Advanced Controls Research Lab
Ongoing Projects and Future Research Directions
•L1 Adaptive Control
•Aerospace Projects
•Other Research Directions
Outline
Advanced Controls Research Lab
Ongoing Projects and Future Research Directions
•L1 Adaptive Control
•Aerospace Projects
•Other Research Directions








MS Graduate Researchers
Our Group
Prof. Naira Hovakimyan

PhD Graduate Researchers
Postodoctoral Researcher








Visiting Scholars
•N. Tekles (TUM, Germany)
•M. Bichlmeier (TUM, Germany)
Affiliated with:
AE, ECE, ISE, CSL
Affiliated with:
AE, ECE, ISE, CSL
E. Xargay
J. Vervoorst
S. Snyder
D. Sun
Y. Ding
H. Lee
V. Cichella
R. Choe
B. Mehdi
X. Li
H. Jafarnejadsani
J. Chongvisal
W. Hao
K. Ackerman
T. Marinho
Research
Math, Technology Development, Technology Transition:
•“We focus on open problems in mathematical control theory and we work withcollaborators from industry and government laboratories on the transition ofour solutions, to the extent possible, to real-world engineering problems.”
Interdisciplinary Research:
•“Our work often involves interdisciplinary collaborations with otherdepartments at University of Illinois and other universities in the US and Europe.We also intensively work with various industries and government agencies tofacilitate the quick transition of our basic research results to applicationowners.”






Collaborators (incomplete list)
Prof. Pedro Aguiar
Prof. Karl J. Åström
Prof. Giulio Avanzini
Prof. Kira Barton
Prof. Tamer Başar
Prof. Carolyn Beck
Prof. Chengyu Cao
Prof. Ramon Costa
Prof. Vladimir Dobrokhodov
Prof. Geir Dullerud
Prof. Oleg Gasparyan
Prof. Tryphon Georgiou
Dr. Reza Ghabcheloo
Dr. Irene M. Gregory
Dr. Rick Hindman
Prof. Florian Holzapfel
Prof. Isaac Kaminer
Dr. Evgeny Kharisov
Prof. Alex Kirlik
Prof. Vishwesh Kulkarni
Prof. Cédric Langbort
Dr. Dapeng Li
Mr. Srinath Mallikarjunan
Prof. Bob Mulder
Prof. Steve Nesbitt
Prof. António Pascoal
Dr. Brett Ridgely
Prof. Dusan Stipanović
Prof. Lui Sha
Prof. Petros Voulgaris
Prof. Xiaofeng Wang
Prof. Matthew West
Dr. Kevin Wise
…
Current Funding
NASA
•Integration of UASs into the NAS
•Loss-of-Control Prevention and Upset Recovery
AFOSR
NSF
Seagate



Advanced Controls Research Lab
Ongoing Projects and Future Research Directions
•L1 Adaptive Control
•Aerospace Projects
•Other Research Directions
Ongoing and Future Projects
L1 Adaptive Control
•Theory
•Applications
•Toolbox
Aerospace-related Projects
•iReCoVeR
•Autonomy
•Very Flexible Aircraft
•Control of unconventional AC configurations
Other Research Directions
•Cyber-Physical-Human Systems
•V&V of Fault-Tolerant Controllers
•Robotic Surgery
•Hard-disk Drive Control
•Repetitive & Adaptive Control
•Information Theory
•Boat autopilots, oil-well drilling, and others…




L1 Adaptive Control
L1 Adaptive Control
The theory of L1 adaptive control enables the design of
robust adaptive control architectures using fast adaptation schemes

The theory of L1 adaptive control enables the design of
robust adaptive control architectures using fast adaptation schemes
Theoretical Developments:
•Output feedback (nonlinear reference systems, peaking phenomenon…)
•Unmatched uncertainties
•Optimal design (nonconvex constrained optimization, randomized algorithms…)
•Connections to Robust Control and IMC (DOB, L1 Robust Control…)
•Shaping of the prediction-error dynamics
Applications & Technology Transition
•Flight control systems (TUDelft, TUM, NASA, Raytheon…)
•Hard-disk drives (Seagate)
•Oil-well drilling (Statoil, NTNU)
•Boat autopilots (Raymarine)
•Wind turbines
L1 Toolbox (Matlab, Simulink, C++)
Aerospace-related Research
LoC Prevention and Upset Recovery (I)
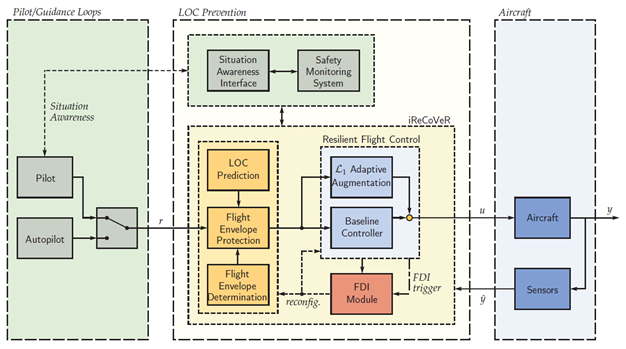
iReCoVeR: Integrated Reconfigurable Control for Vehicle Resilience
LoC Prevention and Upset Recovery (II)
Resilient Flight Control Law
Baseline Controller
L1 Augmentation
Flight Envelope Protection
Dynamic inversion w/ reference models
Upset Onset Detection
Dynamic envelopes (hard vs. soft constraints)
Design of test scenarios
Fault Detection and Isolation
Unknown Input Observers
Sensor failures (hardware redundancy, analytical redundancy)
Icing Effects
Modeling and flight envelope determination
Human-in-the-Loop Flight Simulator
Real-time implementation
Display development and implementation
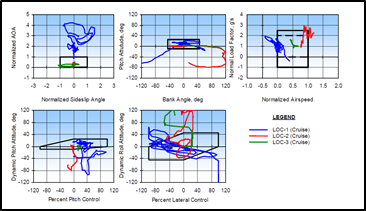
LoC = Excursionoutside 3 envelopes

LoC = Excursionoutside 3 envelopes

Wilborn & Foster 2004
LoC Prevention and Upset Recovery (& III)
Platforms:
TCM (RT simulation)
BAT4 (Sim & FT)
GMAT (Sim & FT)
Autonomy:
Autonomous taxiing, take-off, up-and-away flight, and landing;
Pilot-in-the-loop FCLs for researchtasks.



BAT4
GMAT (15%)
TCM

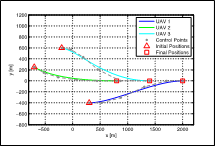
Cooperative Motion Planning & Control (I)
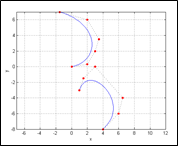
Cooperative Trajectory Generation
Nonlinear constrained optimization
Bezier polynomials
Pythagorean-hodograph curves
Pseudospectral methods
Code development (C++)
Distributed optimization
Cooperative Path Following
Communication-limited environments
Online collision avoidance
GPS-denied environments
Vision-based navigation
Algebraic graph theory, topology control, estimation…
Cooperative Soaring
Guidance for energy harvesting
Atmospheric modeling (PDEs)
Development of a simulation environment
Teams of Cooperating Multirotors
Design of navigation filters
Code development (C++)
Communication systems (hardware integration)


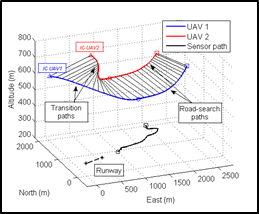
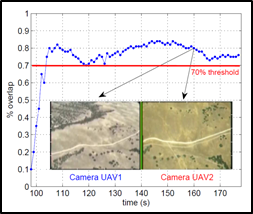
Cooperative Motion Planning & Control (II)
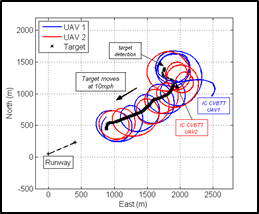
+100 flights
+100 flights
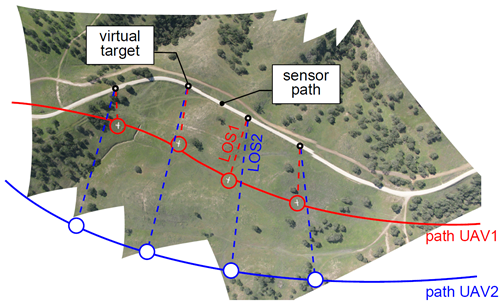
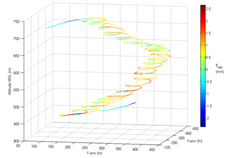
Mosaic of 4 consecutive
high-resolution images
Mosaic of 4 consecutive
high-resolution images
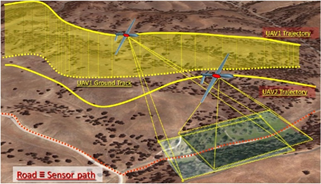
Cooperation ensures satisfactory overlap ofthe field-of-view footprints of the sensors,increasing the probability of target detection
Cooperation ensures satisfactory overlap ofthe field-of-view footprints of the sensors,increasing the probability of target detection

Cooperative Motion Planning & Control (& III)

Basic idea:
•Integration of traditional trajectory-gene-ration and guidance-control algorithmswith weather analysis and forecastingtechniques;
•Power-management policies for improvedenergy harvesting;
•Virtually unlimited endurance for unpow-ered flight is achieved.
Multidisciplinary research:
•meteorology and oceanography;
•PDEs (evolution of atmospheric structures);
•control and trajectory planning.
Developing cooperative autonomous gliders that harvest energy to achieveextended endurance capabilities characteristic of much larger systems

Developing cooperative autonomous gliders that harvest energy to achieveextended endurance capabilities characteristic of much larger systems
Objective

Thermal-seeking soaring gliders areused as flying antennas to extendcommunication range
Thermal-seeking soaring gliders areused as flying antennas to extendcommunication range
Modeling & Control of Very Flexible Aircraft (with Avanzini, Uni Salento)
Developing a minimum complexity model of a very flexible aircraft
and proposing approaches and architectures for GNC of this type of vehicles
Developing a minimum complexity model of a very flexible aircraft
and proposing approaches and architectures for GNC of this type of vehicles
Objective
Basic idea:
•Faster, lighter, more efficient aircraftdesigns result into slender and light highlydeformable structures, where couplingbetween aerodynamic loads, deformationstates and aircraft motion is more sig-nificant with respect to more conventionaldesigns;
•Traditional tools for flight mechanicanalysis of rigid aircraft do not representadequately dynamic behavior and per-formance of flexible aircraft.
Tools:
•Mixed Newtonian-Lagrangian modeling;
•Multi-body dynamics;
•Model validation.

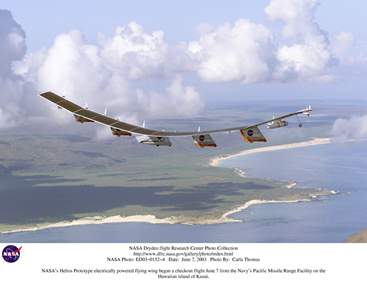
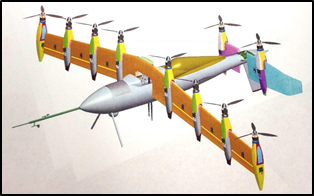
Control of Unconventional Aircraft Configurations

X-48B Blended Wing Body
Augmentation of a dynamic inversion controller
AFRL/Boeing

Grumman X-29
Augmentation of an LQR-PI
NASA Dryden
GL10
(under development)
NASA Langley
Other Research Directions
Cyber-Physical-Human Systems (with Kirlik, Sha, & Beck, UIUC)
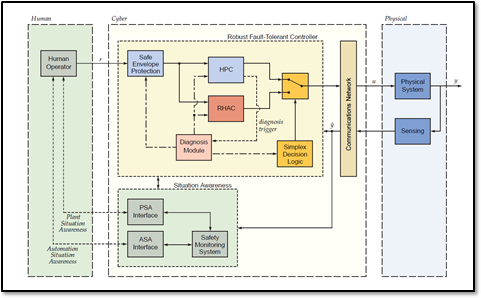


Challenges:
•Develop a framework and a systematic approach for the design of complex systems withco-stability guarantees;
•Formulate new V&V protocols for reduced-complexity architectures;
•Use quantitative human performance and situation awareness modeling techniques toensure that the ASA display provides sufficient information about the behavior ofautomated systems;
•Current target applications: aviation and anesthesiology.
Advanced Robotic Surgery (with Sha, UIUC)

Source: http://campar.in.tum.de
Idea of robotic surgery:
•Interface between surgeon and patient;
•Visual feedback from patient can be augmented by virtual reality;
•Surgeon action can be altered/automated.
Surgeon
Surgeon

Patient
Patient
Robot
Robot
Design Opportunities:
Idea of robotic surgery:
•Highly integrated environment – surgery instruments, sensors, bed, anesthesia are operatedfrom a single control center;
•Sensor information is processed, overlaid and presented optimally for improved awareness;
•Actions of the surgeon are monitored and safety control is employed;
•Simple operations and surgeon assist is automated.
•Trauma robots for field operations, e.g., locating and stopping internal bleeding from liver.
Robotic Surgery
Robotic Surgery
Mechanical Assist
Robotic interface

Mechanical Assist
Robotic interface
Information processingand presentation

Information processingand presentation
AutomationAugmentation

AutomationAugmentation
Safety

Safety
Surgery emulation
Training

Surgery emulation
Training
Hard-Disk Drive Control
Developing control architectures for external vibration compensation
Developing control architectures for external vibration compensation
Objective
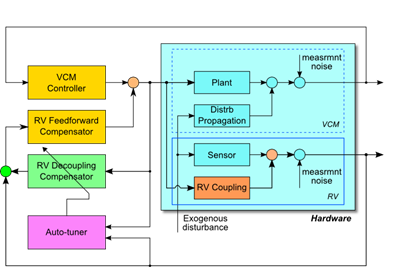
Tasks:
•System identification;
•Uncertainty identification;
•Performance improvement (disturbancerejection);
•Use of adaptive architectures forimproved robust performance;
•Dynamic control allocation.

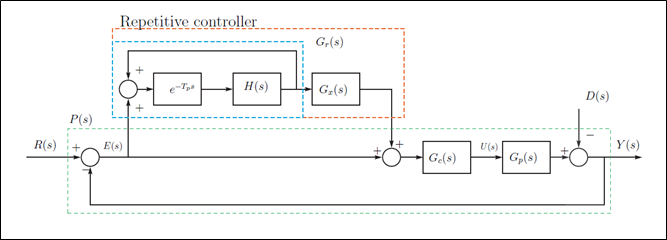
Repetitive & Adaptive Control (with Barton, UMich, & Costa, UPC)
Integrate an L1 controller into a Repetitive Control Framework
Periodic disturbances vs. non-periodic disturbances and uncertainties
Redesign of the control objectives
Internal Model Principle
Applications
Distribution grids / Microgrids (Repetitive, UPC)
•Nonlinear uncertain loads
•Harmonic rejection
•Source uncertainty
Manufacturing (ILC, UMich)

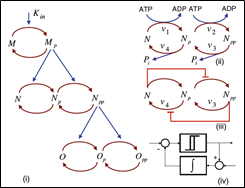
Information Theory
Stochastic Systems with Communication Constraints:
•Analyze the interplay of control and communication in the closed-loop feedbackarchitecture;
•Investigate the fundamental limitations of feedback control in the presence ofcommunication constraints;
•Quantify Bode-like performance limitations for continuous-time systems in the presenceof limited information in terms of mutual information rates.

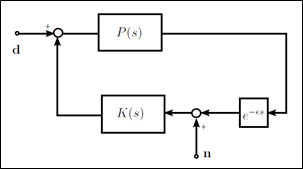
Keywords: stochastic process, probability density, mutual information, entropy, conditional entropy,Kolmogorov entropy rate equality, Bode’s integral formula, channel capacity, SNR…
Other Research Directions
Anesthesia dosing and delivery during surgery (with Beck, UIUC)
Boat Autopilots (with Raymarine)
Oil-well Drilling (with Statoil and NTNU)
Biological Networks (with IIT)