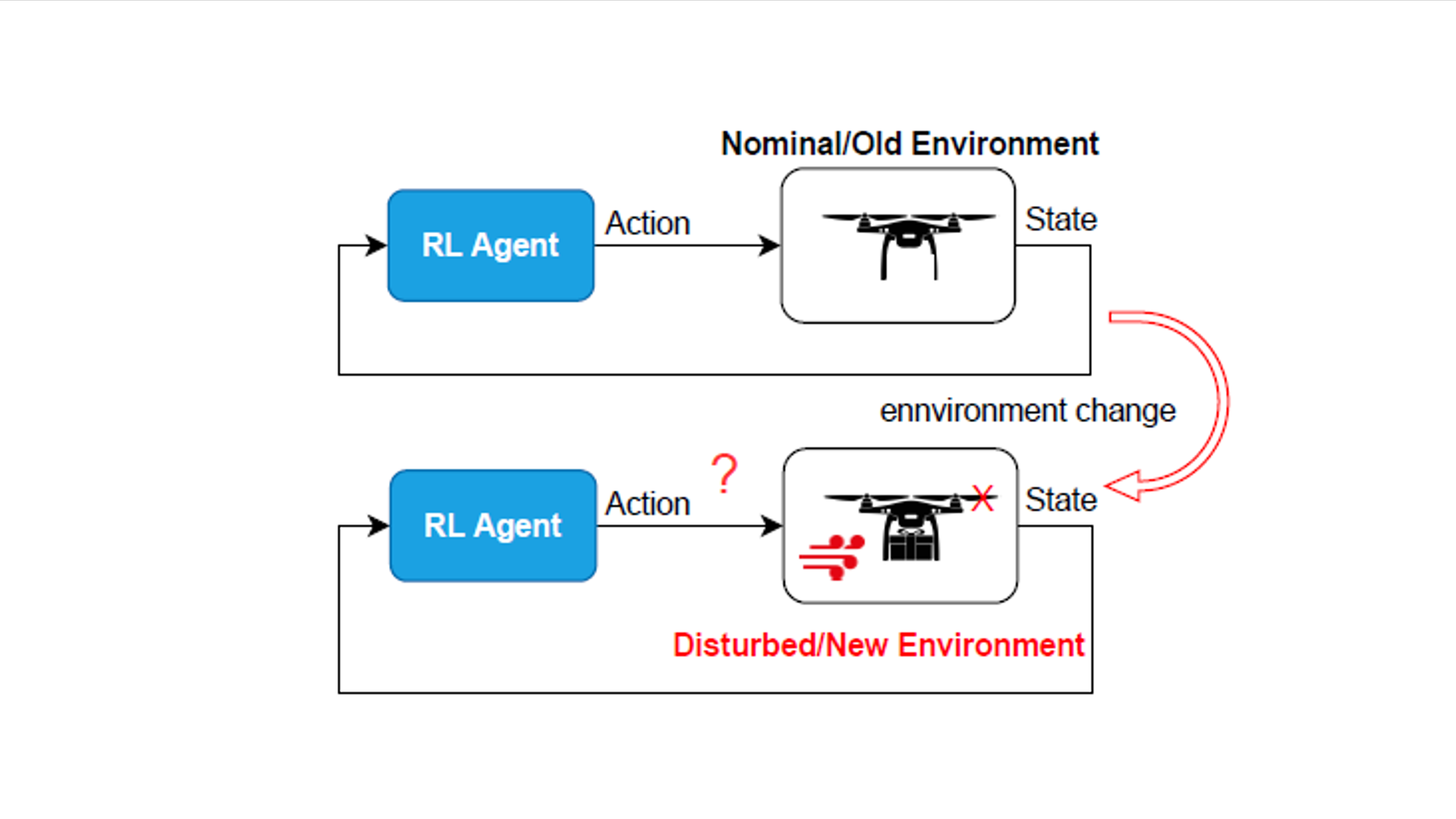
Congratulations! We start a new NSF-AoF collaborative research project: Safe Reinforcement Learning in Non-Stationary Environments With Fast Adaptation and Disturbance Prediction. This project aims to develop a framework to enable safe and efficient reinforcement learning for robot control in non-stationary environments, leveraging control theoretical tools for fast adaptation and perception-based disturbance prediction.
Finnish Partners: Reza Ghabcheloo (TAU), Joni Pajarinen (AU), Nataliya Strokina (TAU)
Link to NSF awards database