Automation Supporting Prolonged Independent Residence for the Elderly (ASPIRE)
As the proportion of elderly population increases, there is a critical need to develop technology to assist older population in their daily activities. To significantly extend the duration of the lifespan in which older adults are able to safely and independently “age in place”, our lab got funded by NSF to work on “Automation Supporting Prolonged Independent Residence for the Elderly” (ASPIRE). This project aims to explore the use of small aerial and ground co-robots in domestic environment. Study shows that for the types of daily activity assistance, fetching objects from the floor or another room, reaching for objects, and finding/delivering items are among those tasks which are preferred to be completed by robot. Thus, it is necessary to design co-robots in a way that promotes comfortable interaction with humans and their environment.
[youtube]https://youtu.be/YoUvRaTnA8c[/youtube]
[youtube]https://youtu.be/gRN_dfu94dY[/youtube]
The images below show some of the autonomous vehicles used and delevoped in our lab to assist elderly in tasks such as bringing them their medication, cell phone, or other small household items.
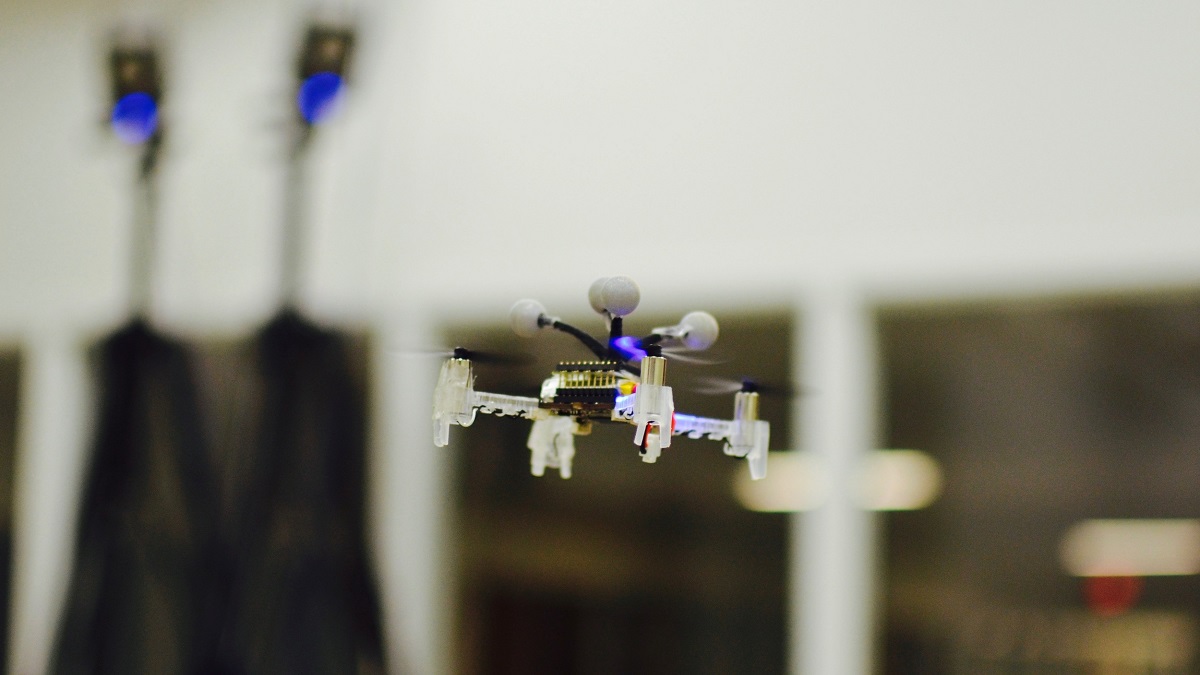


A UAS equipped with a two-link serial manipulator

A 3-DOF parallel manipulator variant
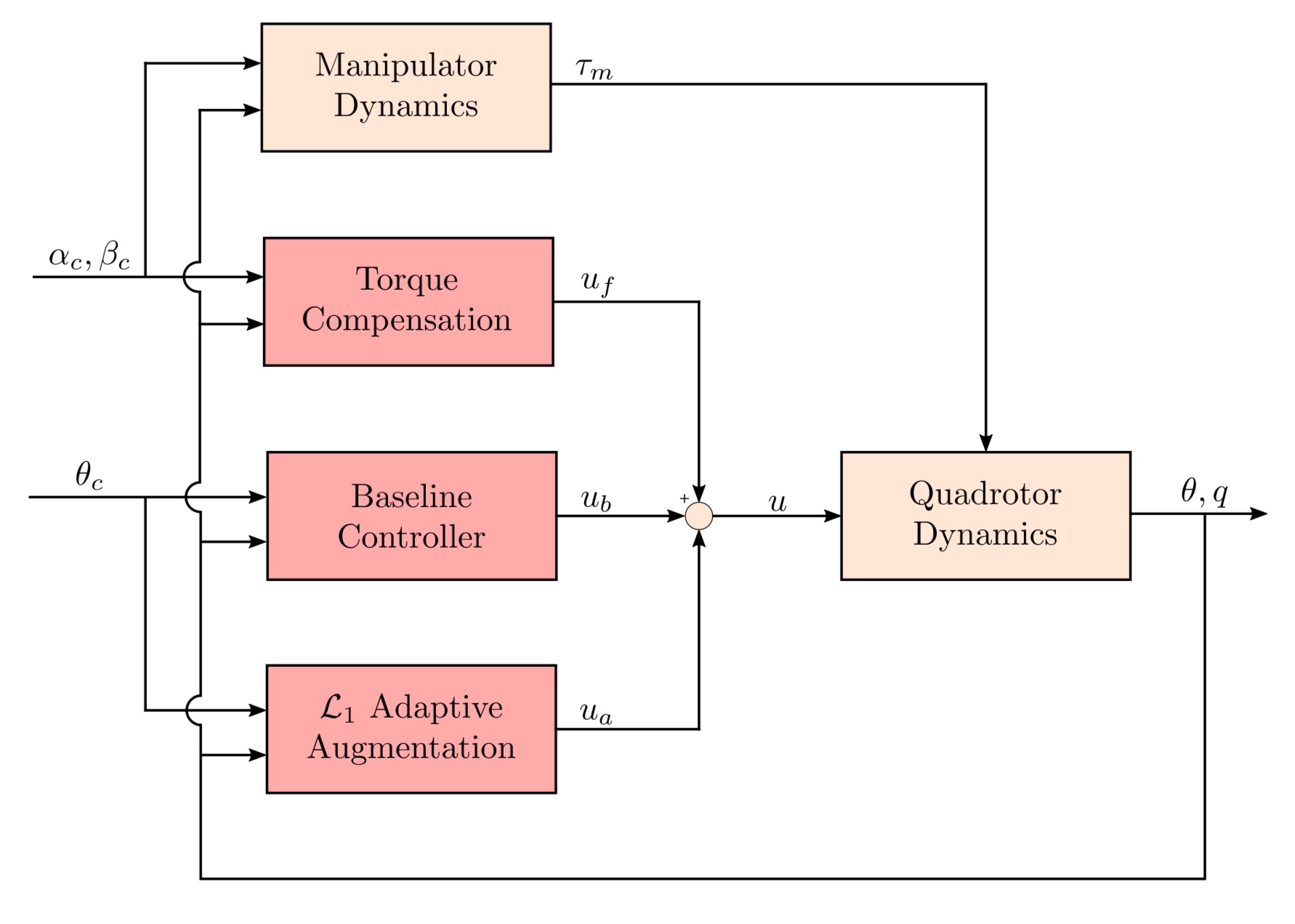 Dynamic system of the two-link serial UAS
Dynamic system of the two-link serial UAS
Publications
- R. M. Jones, D. Sun, G. B. Haberfeld, A. Lakshmanan, T. Marinho, and N. Hovakimyan. “Design and Control of a Small Aerial Manipulator for Indoor Environments”, AIAA Information Systems-AIAA Infotech @ Aerospace, AIAA SciTech Forum, 2017 (AIAA 2017-1374).
- C. Widdowson, H.-J. Yoon, V. Cichella, F. Wang, and N. Hovakimyan. “VR environment for the study of co-located interaction between small UAVs and humans”, 8th International Conference on Applied Human Factors and Ergonomics and the Affiliated Conferences, Los Angeles, USA, 2017
- T. Marinho, C. Widdowson, A. Oetting, A. Lakshmanan, H. Cui, N. Hovakimyan, R. F. Wang, A. Kirlik, A. LaViers, and D. Stipanovic. “Carebots: Prolonged Elderly Independence Using Small Mobile Robots”, ASME Dynamic Systems & Control Magazine, Vol. 4, No. 3, pp. 3-7, 2016.
News
ASPIRE on Nightly Business Report CNBC
ASPIRE in the New York Times
ASPIRE on WCIA 3 News
ASPIRE on Internet of Things Podcast
ASPIRE in ChicagoInno
Bibbidi Bobbidi Bots
To read more about the NSF/ASPIRE and their funding of this project, click here.