Learn-to-Fly
Learn-to-Fly is a new framework that aims to eliminate or reduce ground-based aero-dynamic modeling in the traditional development paradigm for aerial vehicles in favor of in-flight modeling and control law determination. At the initial learning stage, large uncertainties or errors inevitably exist with the learned model. For guaranteeing vehicle safety in the presence of such uncertainties and model errors, researchers from NASA Langley Research Center (LaRC) and Prof. Naira Hovakimyan’s lab at the University of Illinois at Urbana-Champaign designed an L1 adaptive control (L1AC) law to actively estimate and compensate for the discrepancy between the intermediately learned dynamics and the actual dynamics. The framework is validated by flight tests on UAVs performed by NASA LaRC in 2017 and 2019.
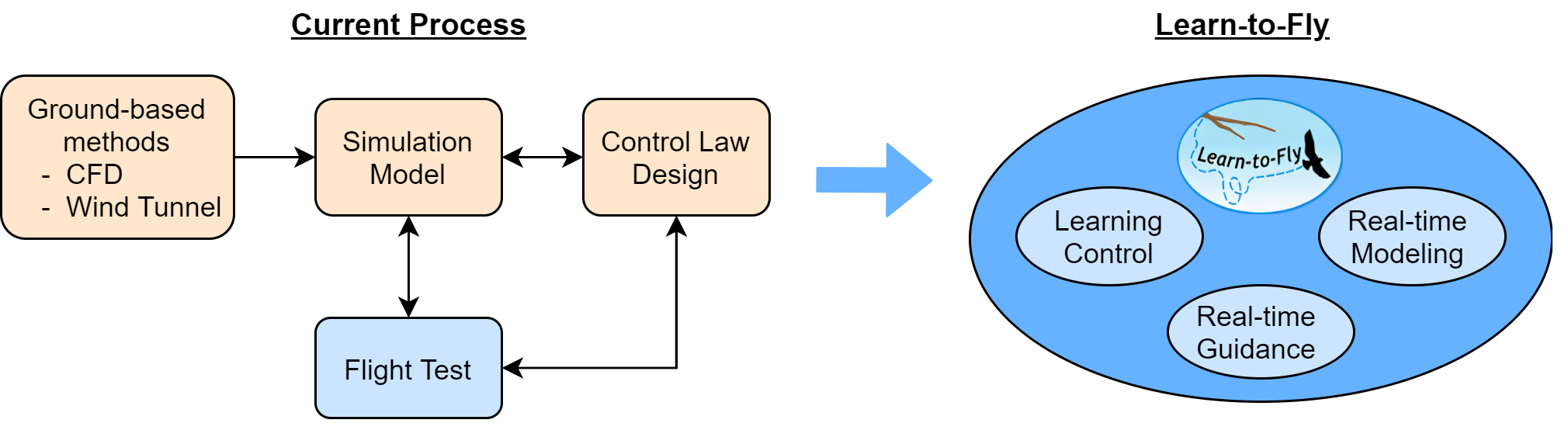
Picture 1. Learn-to-fly concept

Picture 2. E1 vehicle during flight tests (from [2])
[youtube]https://youtu.be/UTQTXEp4WmA[/youtube]
Video 1. Flight tests of a Learn-to-Fly system with an L1 adaptive controller
Reference
[1] S. Snyder, P. Zhao* and N. Hovakimyan. L1 adaptive control for Learn-to-Fly, submitted to Journal of Guidance, Control, and Dynamics, 2021. arXiv:2108.08462
[2] S. E. Riddick, R. C. Busan, D. E. Cox, S. A. Laughter. Learn to fly test setup and concept of operations. In 2018 Atmospheric Flight Mechanics Conference, 2018.