L1-GP: L1 Adaptive Control with Bayesian Learning
Aditya Gahlawat, Pan Zhao, Andrew Patterson, Naira Hovakimyan, Evangelos A. Theodorou
link: [Poster] [Article]
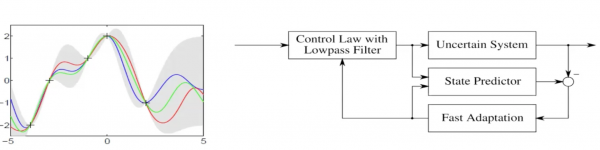
Abstract: We present L1-GP, an architecture based on L1 adaptive control and Gaussian Process Regression (GPR) for safe simultaneous control and learning. On one hand, the L1 adaptive control provides stability and transient performance guarantees, which allows for GPR to efficiently and safely learn the uncertain dynamics. On the other hand, the learned dynamics can be conveniently incorporated into the L1 control architecture without sacrificing robustness and tracking performance. Subsequently, the learned dynamics can lead to less conservative designs for performance/robustness tradeoff. We illustrate the efficacy of the proposed architecture via numerical simulations.